3D-Printed Soft Sensors
Design of 3D-Printed Soft Sensors for Wire Management and Customized Softness
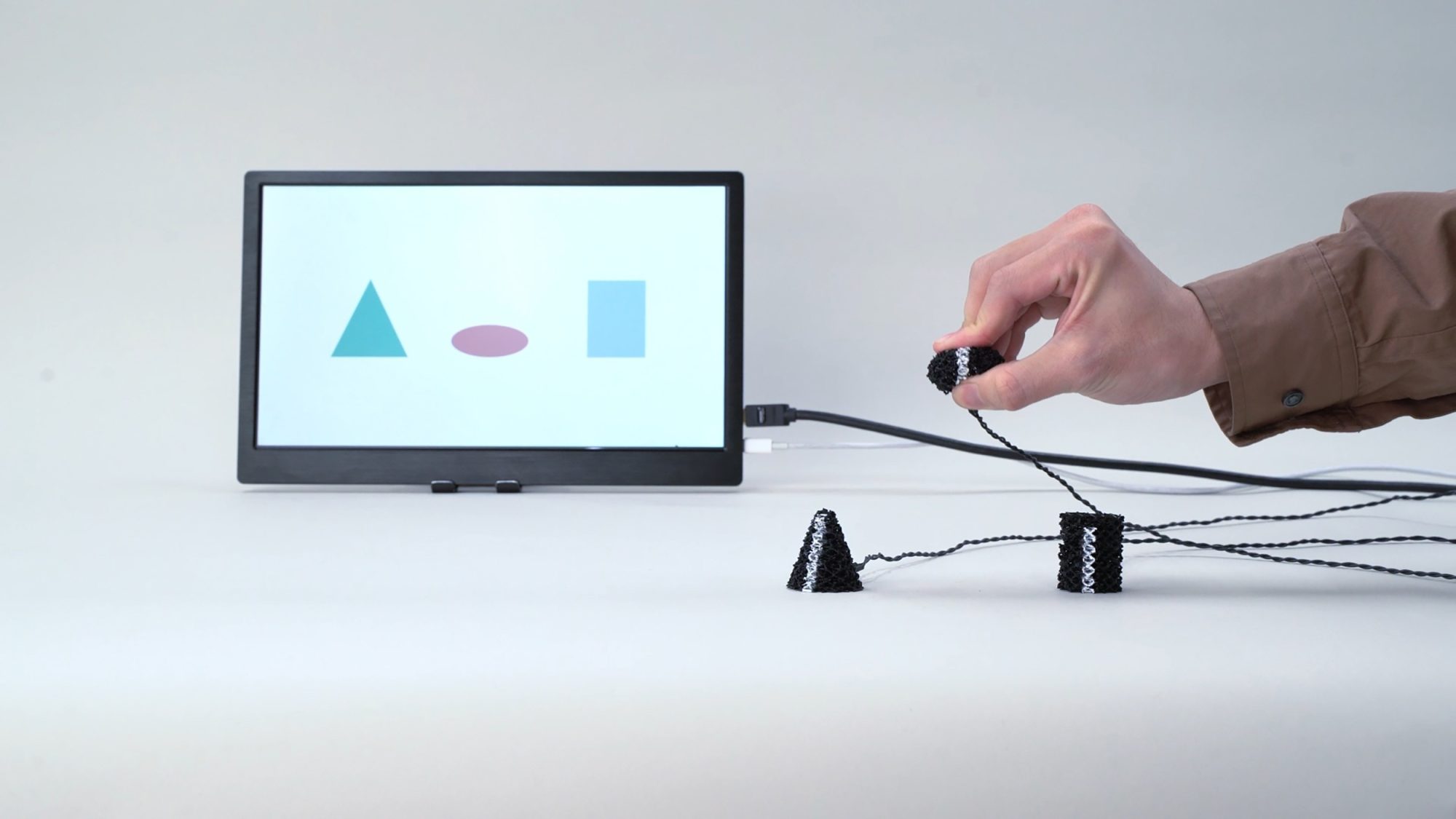
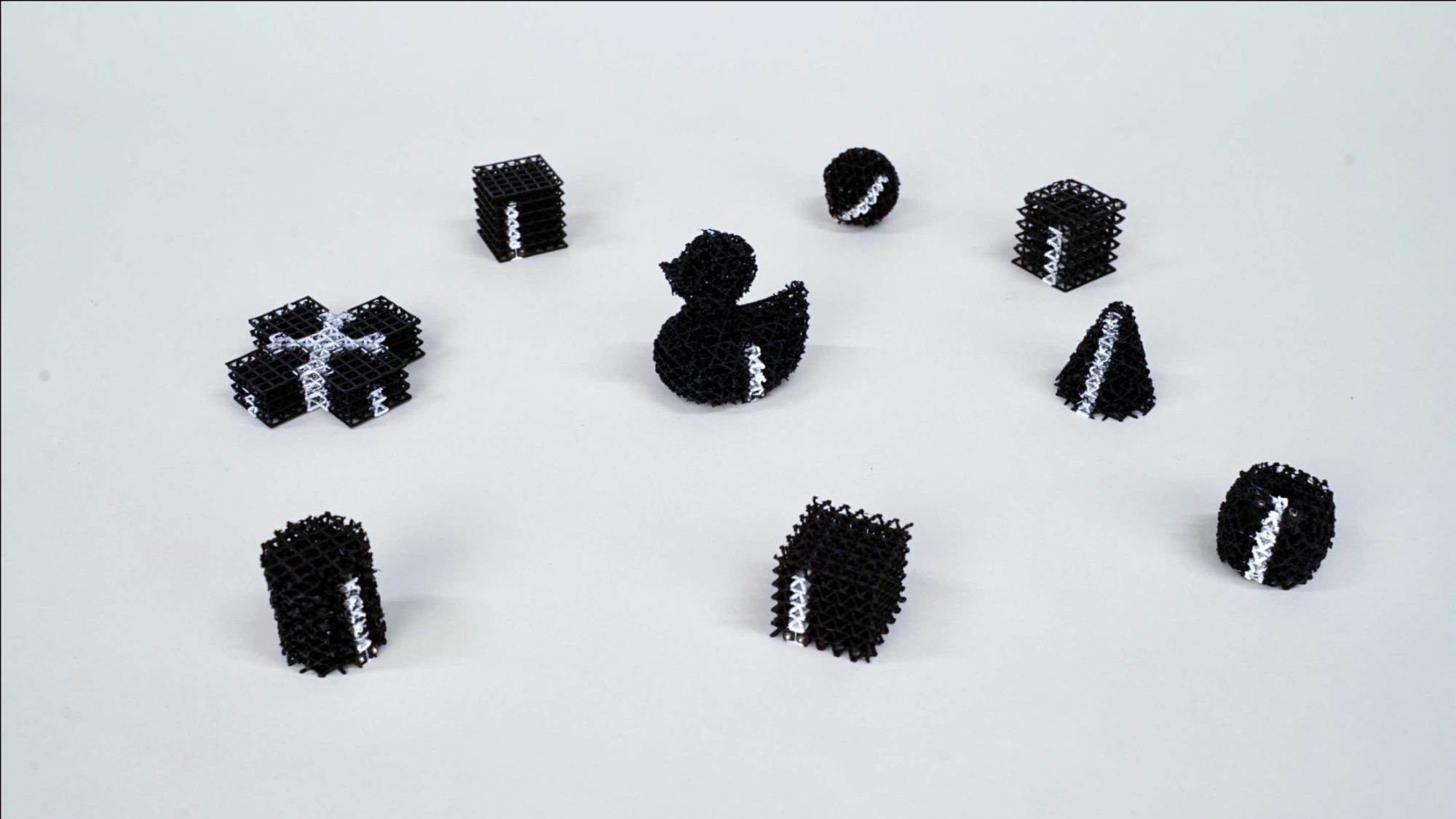
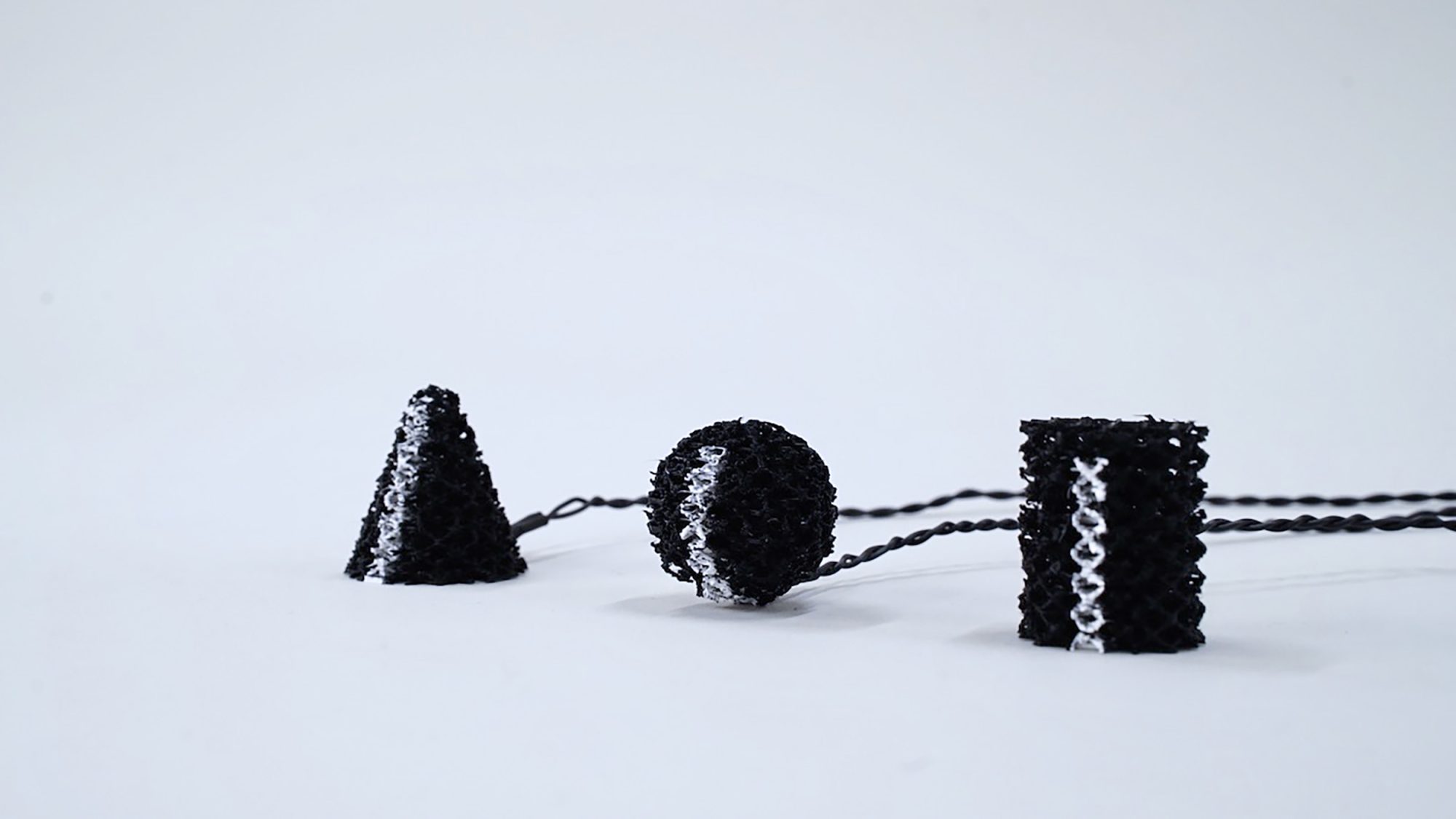
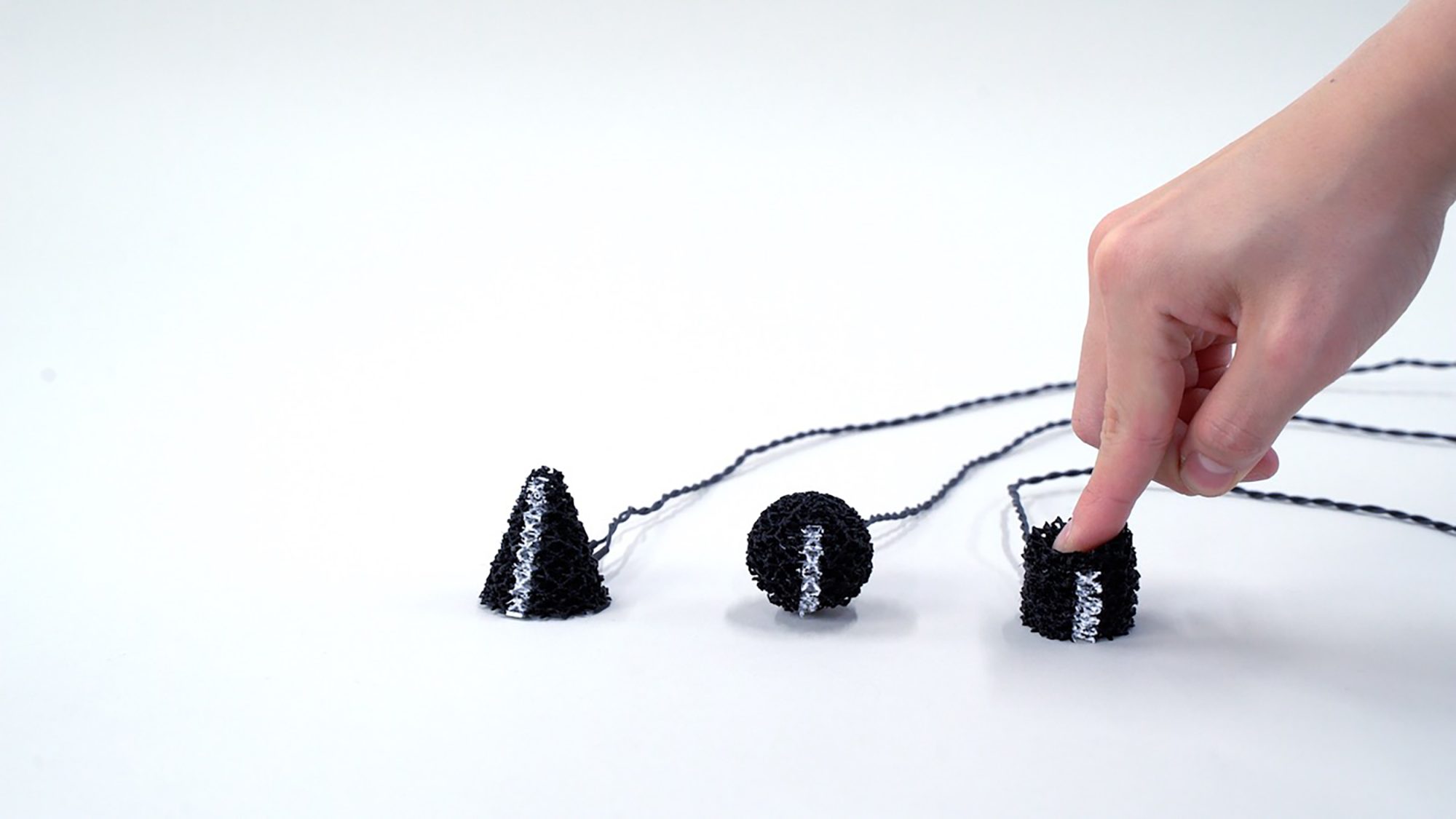
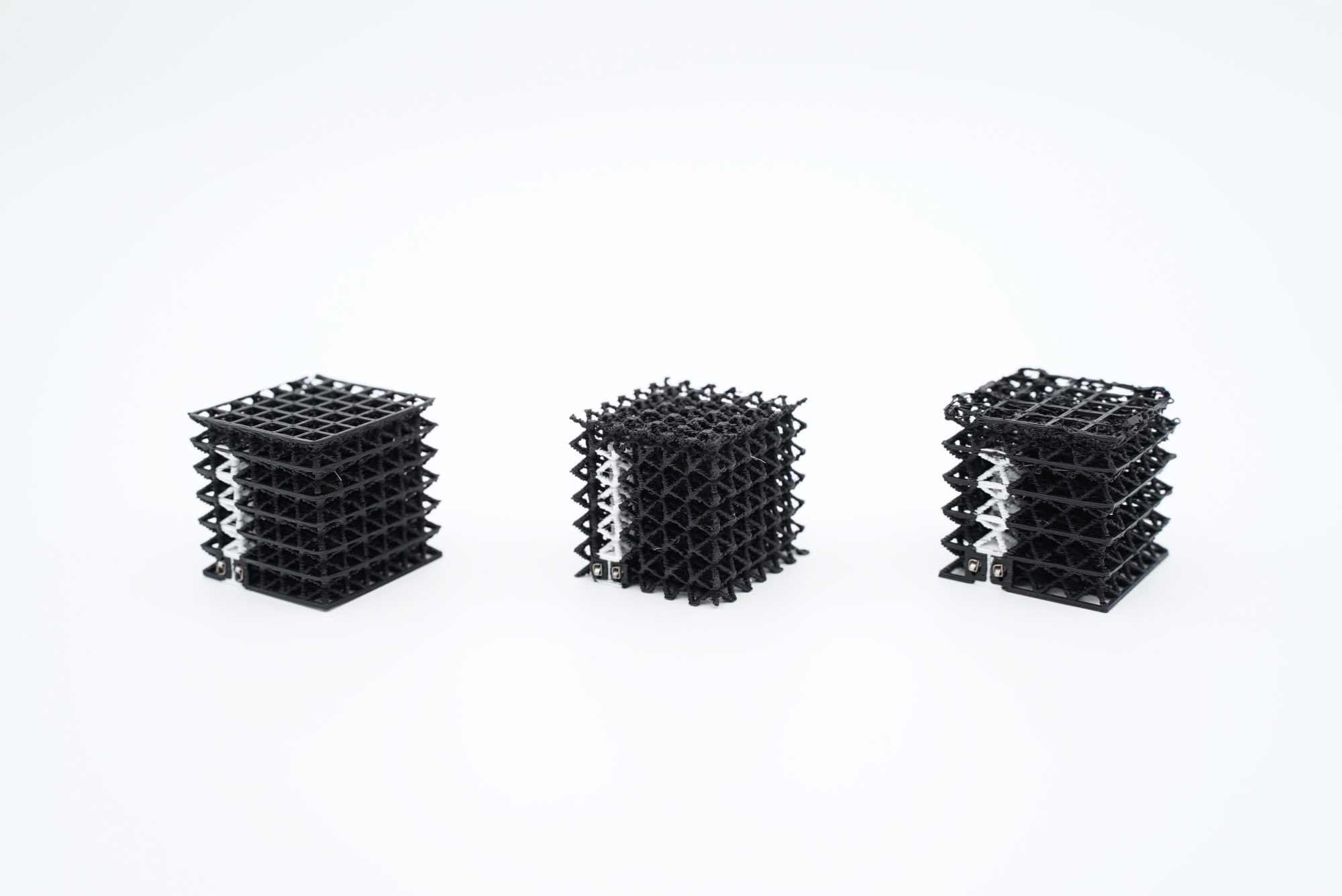
Although the interaction capability of soft sensors has been explored in the field of HCI, they are found to have limitations in shape, wiring management, and softness due to the characteristics of the material. In this paper, we propose a design of 3D-printed resistive soft sensors that can detect deformation by creating internal lattice structures with flexible conductive materials. The magnitude of deformation can be detected by measuring the resistance between a pair of electrodes. By adjusting the parameters of the lattice structure, a soft sensor with high flexibility of shape design and adjustable local softness can be realized. In addition, by inserting non-conductive structures into the sensor structure, external wires can be consolidated in one place. We present a design and fabrication pipeline, and investigate the fundamental characteristics of several patterns of sensors. We also show several applications that demonstrate the feasibility of the proposed method.
HCI分野では、ソフトセンサのインタラクション機能が検討されているが、材料の特性上、形状、配線管理、柔らかさなどに限界があることが分かっている。本研究では、柔軟な導電材料で内部格子構造を作り、変形を検出できる3Dプリント可能なソフトセンサの設計を提案する。このセンサでは、一対の電極間の抵抗値を測定することで、変形の大きさを検出することができる。格子構造のパラメータを調整することで、形状設計の自由度が高く、局所的な柔らかさを調整できるソフトセンサを一体造形することができる。また、センサ構造内に非導電性構造体を挿入することで、外部配線を一箇所に集約するなど配線設計の自由度を高める工夫を施した。CHI2022 Interactivityでは、設計・製作パイプラインを紹介し、数パターンのセンサの基本特性を紹介した。また、提案手法の実現可能性を示すいくつかのアプリケーションを実装した。
Publications:
Rei Sakura, Changyo Han, Keisuke Watanabe, Ryosuke Yamamura, and Yasuaki Kakehi. 2022. Design of 3D-Printed Soft Sensors for Wire Management and Customized Softness. In CHI Conference on Human Factors in Computing Systems Extended Abstracts (CHI EA ’22). Association for Computing Machinery, New York, NY, USA, Article 192, 1–5. https://doi.org/10.1145/3491101.3519906
*本研究は、科研費 学術変革領域研究A「実体の質感情報を引き出すフィジカルメディアの設計と表現実践」、および株式会社メルカリR4Dとの共同研究の一部として行なっています。